Sau coole Arbeit ![]()
Der BTS 114 im Steuergerät verkraftet zwar 50V aber nur 17A und hat einen innenwiderstand von 0,1 Ohm bei 2A Dauerbelastung sind das 0,4 Watt Verlust und der Kühlkörper ist eher eine Vorsichtsmaßnahme.
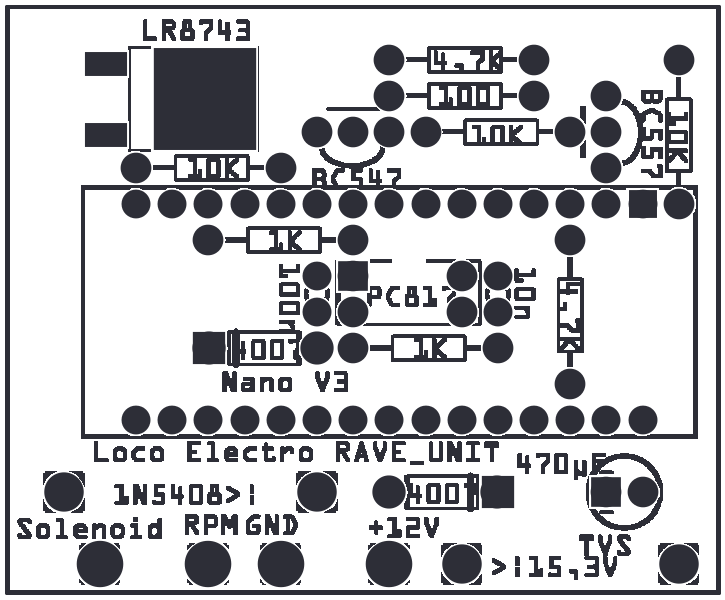
Der IRLR 8743 kann zwar nur 30Volt aber dafür gut 100A und hat nur 0,04 Ohm Innenwiderstand das macht im Dauerbetrieb 0,16 Watt Verlust, ich denke da bleibt alles cool.
Zur Status LED:
Die Arduino LED gibt an das die Schwellwerte für eine Ativierung überschritten wurden, die LED am Optokopplermodul signalisiert den Aktiven Zustand am optokoppler.
Du kannst dir auch den Code anpassen und zwei freien Pins vom Arduino für die Duo LED vergeben.